
What is an INS? Definition, Types, and Latest Innovation
Internal navigation system (INS) uses motion and rotation sensors and an onboard computer to determine the vehicle’s position, orientation, and movement speed without using visual references.
Originally developed in the MIT Instrumentation Laboratory for a B-29 bomber in the 1950s, INS has become a staple for self-contained navigation for aerospace, maritime, and automotive industries.
How Does an Inertial Navigation System Work?
INS uses dead reckoning to determine the vehicle’s current position by using its last known coordinates as the starting point for comparison. It then provides real-time position and navigation data by correlating changes in starting point, speed, and direction with new sensor inputs.
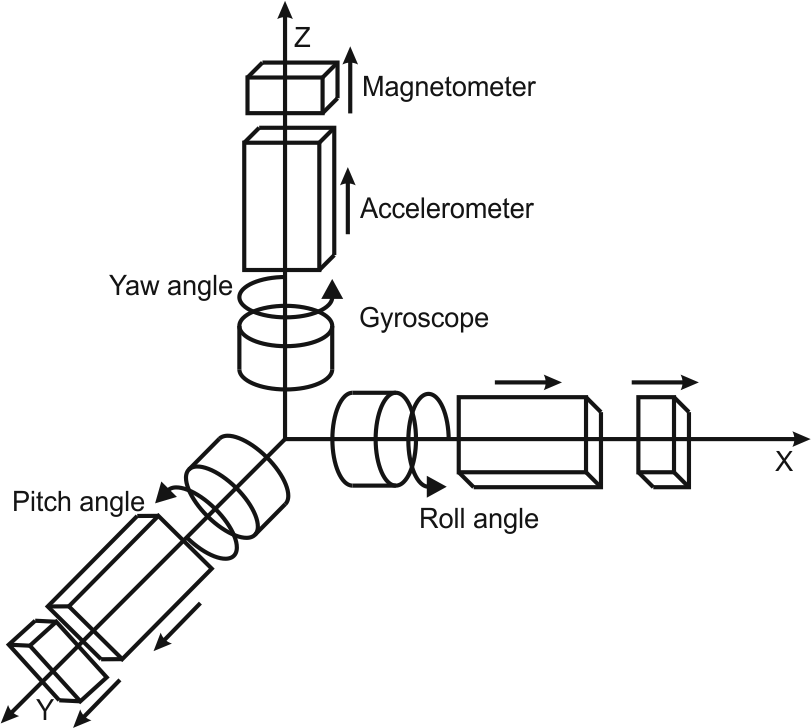
Most modern internal navigation systems include an inertial measuring unit (IMU) — a sensor subsystem that provides raw data inputs like altitude, position, orientation, angular rate, and linear velocity.
Source: ResearchGate
Inertial measuring units (IMUs) typically feature the following sensors:
- Accelerometers to calculate changes in velocity and position
- Gyroscopes for angular velocity estimation to detect rotational motion
- Magnetometers to determine movement direction relative to the Earth’s magnetic field
- Barometers/Altimeters to measure atmospheric pressure for altitude calculations.
Common Types of Internal Navigation Systems
INSs differ significantly in hardware configuration—each having different tradeoffs in accuracy, cost, and application feasibility. The common INS types are:
- Strapdown Inertial Navigation Systems (SINS) have sensors strapped directly to the vehicle. They’re lightweight and easy to implement, ideal for drones and light robotics. But SINSs require high computation power to handle sensor noise due to vehicle motion.
- Gimbaled Inertial Navigation Systems (GINS) use gimbals to ensure greater reference stability. But they’re heavier, more complex, and susceptible to mechanical wear.
- Fiber Optic Gyro-based Inertial Navigation Systems (FOG INS) leverage fiber optic gyroscopes for precise rotation measurement. FOG is more immune to vibration and environmental interference but costlier.
- MEMS-based Inertial Navigation Systems feature accelerometers and gyroscopes, based on Micro Electro Mechanical Systems. They are cost-effective and compact but have lower accuracy than FOG or RLG systems.
- Ring Laser Gyro-based Inertial Navigation Systems (RLG INS) use ring laser gyroscopes for precise motion measurement. They boast high durability and are vibration-immune, but come at a premium price.
- GNSS-Aided Inertial Navigation System typically features a 3-axis gyroscope, a 3-axis accelerometer, and a GNSS receiver (and sometimes a 3-axis magnetometer) for navigation. Each contributes different coordinates for high accuracy. The problem? If the GPS is down or lagging, navigation becomes unreliable—and that’s a major limit industries aim to solve.
Inertial Navigation System vs GPS: What’s the Difference?
INS is a self-contained system that doesn’t require external connectivity (e.g., satellite or wireless networks) to guide the vehicle. As such, it’s less prone to magnetic interferences or targeted attacks, especially with EMI shielding.
GPS, in turn, is a satellite-based system that provides positioning data only when and where there’s an unobstructed line of sight to satellites. This makes it unsuitable for underwater navigation, UAV or aircraft flights in contested environments, or autonomous driving through tunnels or underground shafts.
Due to GPS’s vulnerability to signal loss, interference, and jamming in contested environments, many organizations use INS over GPS. Recent advances in sensor fusion and AI improved internal navigation system accuracy and connectivity range.
Getting more from your INS with AI
Bavovna developed an Al-enhanced INS for uncrewed vehicles that delivers 98% accuracy over a long range and supports fully autonomous flights in GPS-denied environments.
We’ve developed a compact strap-down model with an IMU and AI-powered flight control, weighing only 800g. For navigation, we apply sensor fusion to accelerometer, gyroscope, compass, barometric pressure, and airflow data, with the option to connect more sensors. Each AI model is custom-trained for your uncrewed vehicle on at least 100 hours of live flight data to ensure top accuracy during autonomous flights.
In the field, our hybrid INS system can maintain under 0.85-meter deviation of single-point positioning without GPS, RTK, and optical navigation at 500 meters altitude with 18 m/sec wind. Learn more about Bavovna AI Navigation Kit.



