Since 1993, the GPS has been tightly integrated into our daily lives. From recording bank transactions to guiding transatlantic flights, the technology generates about $1 billion a day in economic impact.
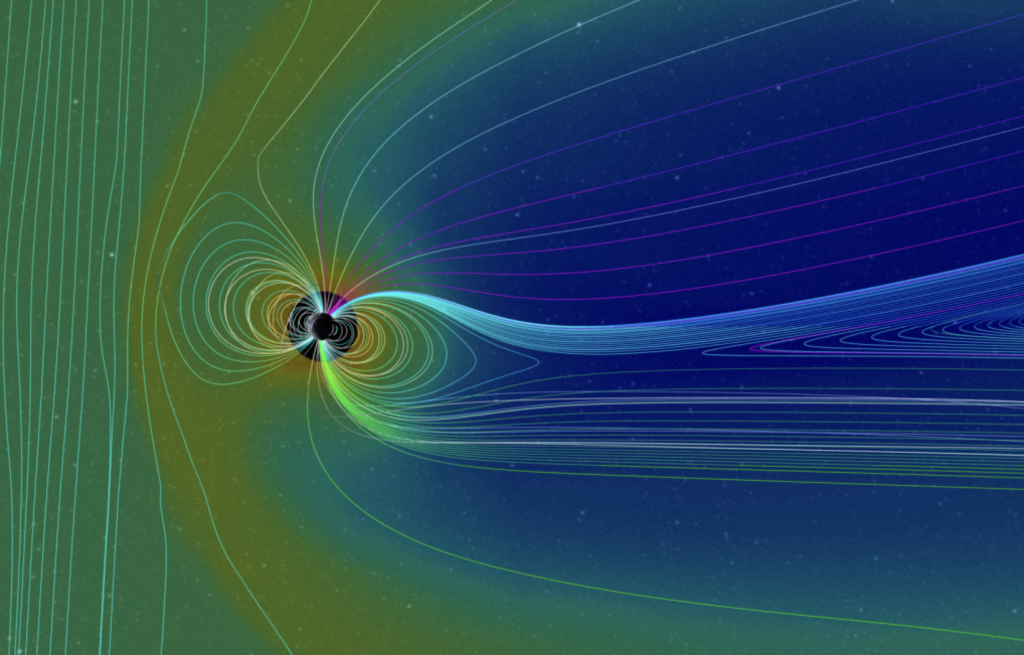
But just like any other system, GPS has its fair share of limitations. Challenging terrain, signal jamming, and spoofing can render it useless. And that happens quite a lot. Drone use cases in mining are severely limited by naturally occurring magnetic interference. Thousands of commercial flights get affected every year by targeted or incidental GPS signal jamming. Not to mention countless security and military operations, where signal spoofing is the name of the game.
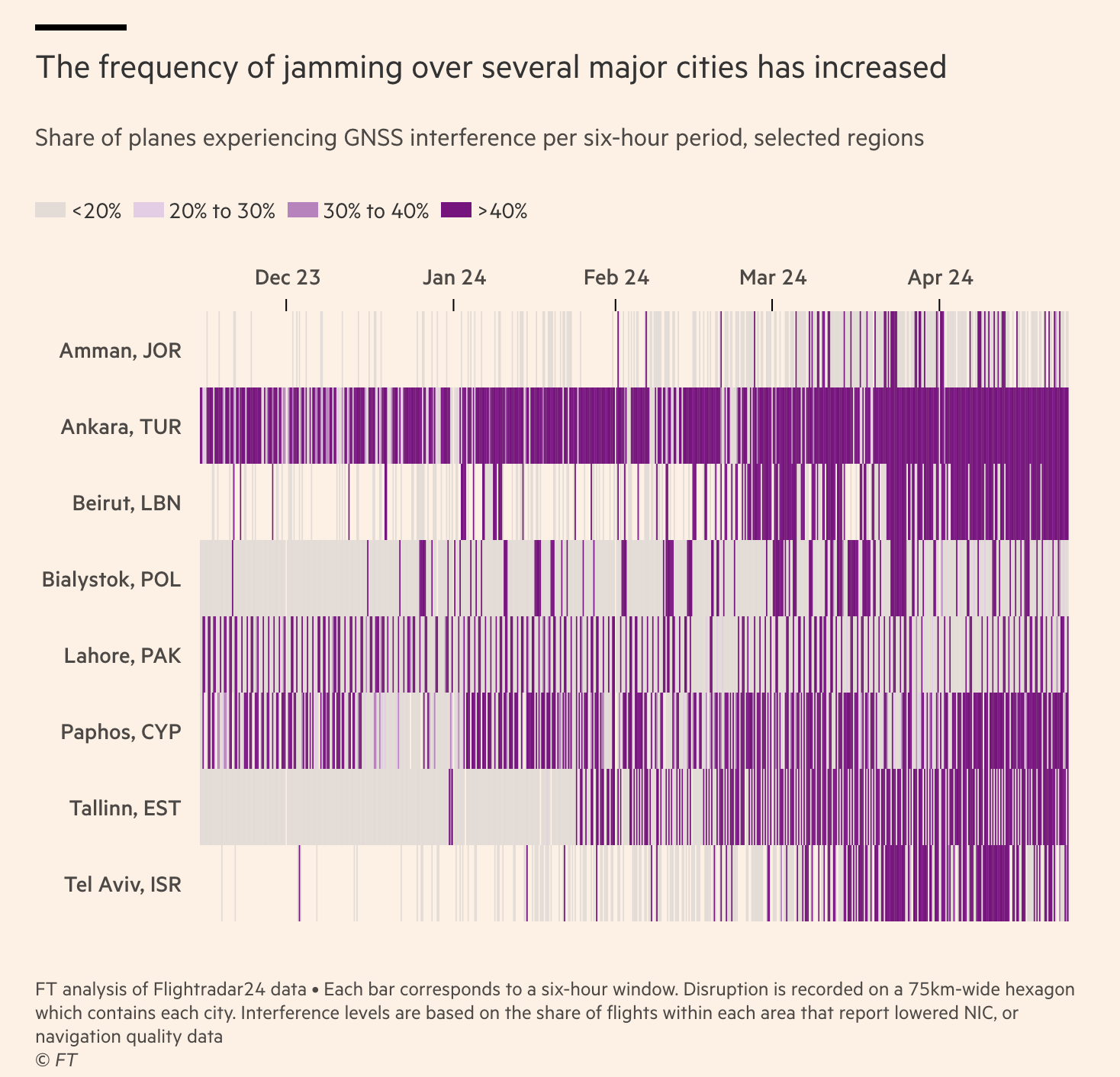
Source: FT
Soundly, alternative technologies exist for GPS-denied navigation — and here are the top 3 solutions.
Hybrid INS Powered by AI
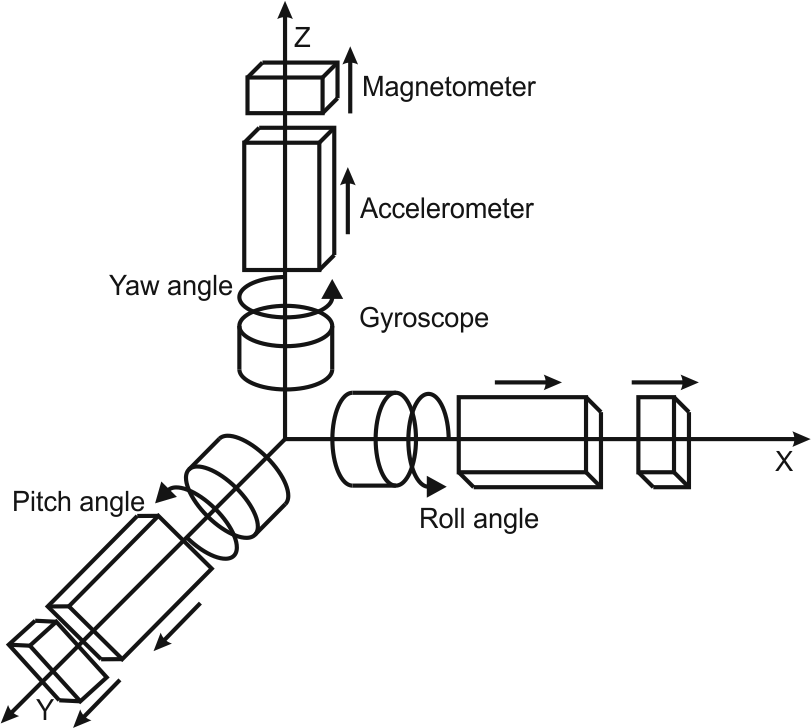
Internal navigation systems (INS) rely on data gyroscopes and accelerometers to estimate the vehicle’s current position, in relation to its last known point. The problem, however, is that many off-the-shelf systems lack accuracy, especially over a longer range.
Bavovna is changing that with its AI-driven inertial navigation unit. Compact, low-power, and EMI-shielded, Bavovna brings AI sensor fusion technology to UAV navigation. The onboard unit can process data from any number of sensors—accelerometer, gyroscope, compass, barometer, vector airflow, ultrasonic, infrared, or optical flow sensors—to deliver high-precision navigation in GPS-denied environments. The endpoint positioning error is just under 0.5% even when flying complex routes. Our solution is fine-tuned on live flight data from your vehicle, ensuring unbeatable reliability and durability in a variety of conditions.
For instance, our latest deployment on Aurelia X6 Max Pro-D allows performing fully autonomous air tower missions—vertically take-off, hoover, and land, without any maps or additional correction from GPS or RTK. With Bavovna’s AI kit, you can safely establish communication relays, perform terrain reconnaissance, perform security monitoring, and fly a range of other missions without worrying about GPS signal degradation, jamming, or loss.
Quantum Positioning Systems
The Royal Navy is looking to another emerging technology to improve INS—quantum computing. Atoms exhibit quantum behavior changes in response to the smallest amount of motion when cooled near absolute zero. These changes can be measured and used to obtain positioning, navigation, and timing (PNT) data. The catch? Cooling down atoms requires huge, power-hungry equipment.
Aquark Technologies may have found the answer to this quandary. The quantum startup develops miniature quantum systems. Its compact cold atom navigation system uses lasers to bring the temperature down to (-273.15C), which makes it possible to collect motion data on an atomic level and use it for navigation. Aquark Technologies has been successfully tested on a Royal Navy patrol vessel in October 2024.
Silicon Photonic Optical Gyroscopes (SiPhOG)
Fiber-optic and ring laser gyros offer the best accuracy, but they are also too expensive for many commercial applications. MEMS gyroscopes are way cheaper but lack precision. ANELLO Photonics wants to close this gap with its SiPhOG technology.
A silicon photonic integrated circuit is used to manufacture the waveguides on-chip, allowing the company to achieve Fiber Optic Gyro performance with a standard silicon manufacturing process. Its INS system has a drift rate of less than 0.5° per hour and demonstrated strong performance in GPS-denied environments. It maintains accuracy within 0.1 m over distances of 0.8 km without GPS, even in orchard environments with limited GPS signals.
Navigation technology moves quickly and better alternatives to GPS are emerging every day. Many also boast high customization like Bavovna’s AI navigation kit, allowing multiple deployment scenarios across different hardware — fixed wing, tilt wing, VTOLs, multi-copters, and FPV drones. Contact us for a free demo!